本研究室では電気、電子、情報、通信、等の各分野を含む「工学」と生物学や医学等を含む「生命科学」とが交叉することで生まれる新しい技術や学問領域を追求しています。具体的には様々な分野で利用可能な生体情報計測技術や医療・福祉ロボットに関する研究、新しいリハビリ手法・治療方法の探求、工学的手法に基づくバイオメカニズムの解明、高効率な海産物の陸上養殖技術の研究などに、国内外の機関と連携して取り組んでいます。
テーマ1)睡眠時無呼吸症候群治療装置の研究
睡眠の質は我々の健康を大きく左右します。睡眠障害の一種である睡眠時無呼吸症候群の新しい治療装置に関する研究を行っています。頭部姿勢を自動調整することで睡眠時の呼吸を改善するヘッドキャップ型治療装置を提案し、試作機を用いた試験で優れた気道開通効果が確認されました。また、軽症者を対象としたオーダーメイド枕治療の最適化を目的として、個人の頭部姿勢と呼吸流量との関係を簡便に調べることのできる測定器の開発にも取り組んでいます。
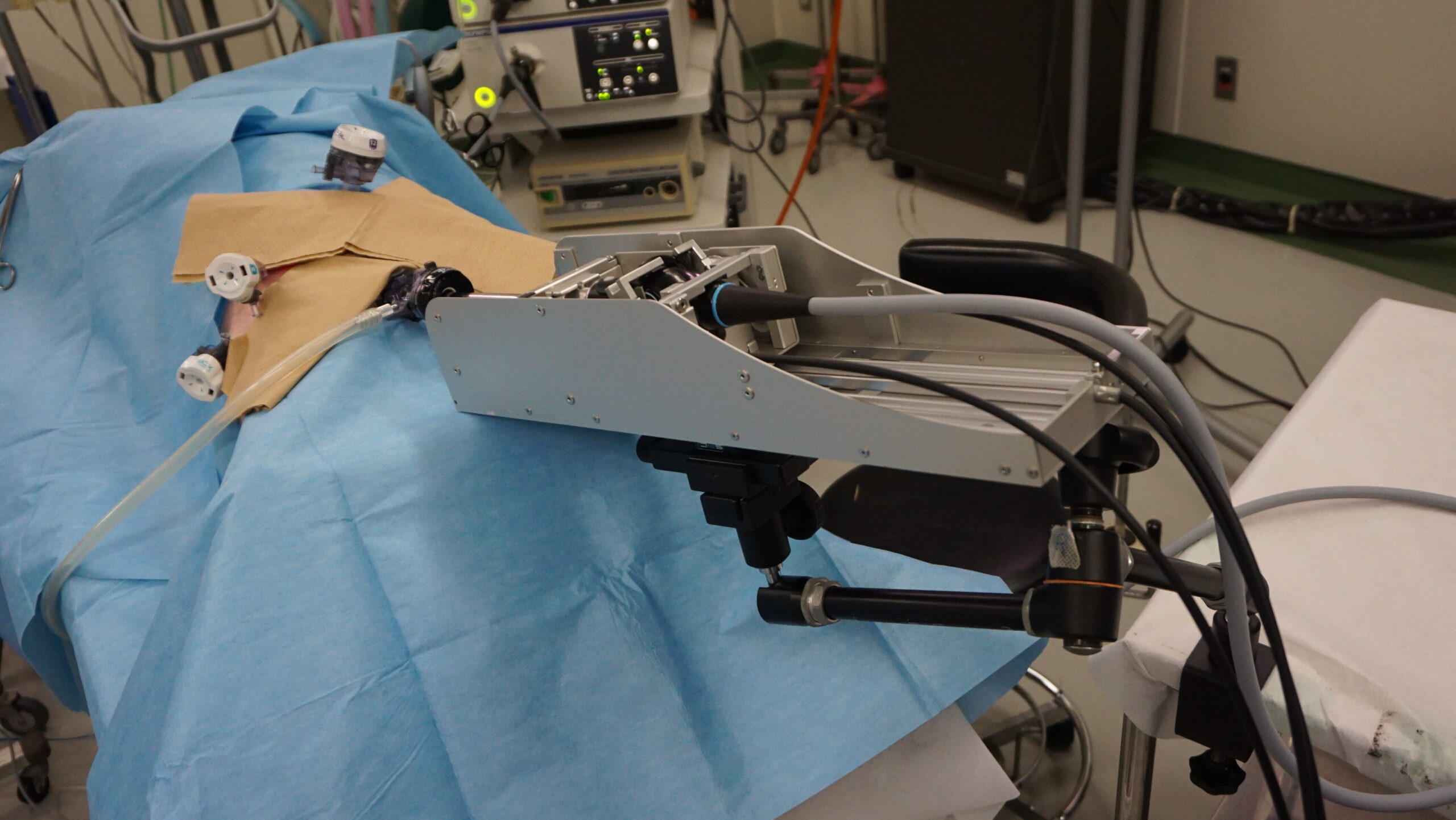
テーマ2)内視鏡手術支援ロボットシステムの研究
通常、腹腔鏡下手術には術者、助手、スコピスト活動報告写真の3名の医師が必要と言われています。医師1名で腹腔鏡下手術を可能とするロボット型支援器具の開発に長崎大学病院移植・消化器外科と共同で取組んでいます。

テーマ3)手指麻痺者の指運動を実現する電動式グローブの研究
頚髄損傷や脳梗塞等の後遺症で手指に麻痺を負った方々の指運動を実現するための電動式グローブの実用化研究を行っています。また視覚誘導性錯覚を利用した上肢機能回復訓練用電動式グローブシステムの研究を東京女子医科大学、長崎大学医学部と共同で行っています。また脳波で操作するリハビリ用グローブシステムについてカリフォルニア大学アーバイン校と共同研究を行っています。
テーマ4)磁石を用いた体内カテーテルの三次元位置計測に関する基礎的研究
本研究では、体外に固定された複数の磁気センサを用いて、プローブ先端に固定された永久磁石の三次元位置を測定し、プローブの位置及び姿勢を精度良く測定するシステムの開発に取り組んでいます。
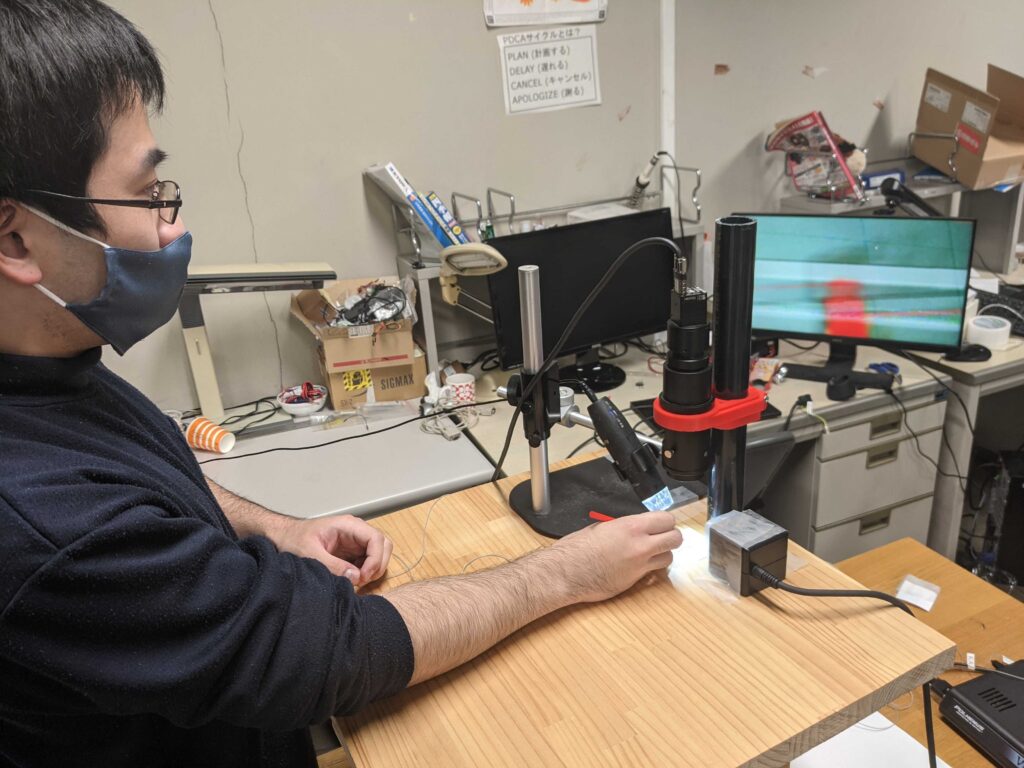
テーマ5)眼科微細手術時の手振れ防止を目的とした支援器具の研究
我々の体には「生理的振戦」と呼ばれる微細な振動が生じています。顕微鏡下で行う眼科の微細手術では、振戦による手術器具の振動は手技の大きな妨げとなります。本研究室では、長崎大学医学部眼科・視覚科学教室および、同大情報データ科学部柴田研究室と連携して生理的振戦に由来する手術器具の微細振動を抑制するための工学的支援技術の開発に取組んでいます。
テーマ6)運動支援機器のためのマン-マシンインターフェースの研究
人と機械の間に立って情報や効果をやり取りする装置をマン-マシンインターフェースと呼びます。ロボットスーツや手術支援ロボットなど、人と接する機器の性能や使いやすさはマン-マシンインターフェースの性能に大きく依存します。衣服の上から筋活動を測定可能なセンサなど、独自のセンサ技術に基づき、新しいマン-マシンインターフェースの実現に取組んでいます。
テーマ7)筋活動推移のデザインが可能な筋力トレーニング装置の研究
筋力トレーニングにおいて、筋力強化の効果は筋肉に加わる負荷量に依存します。しかし多くの筋力トレーニング機器は負荷を実現するための荷重の重さしか調節することしかできません。しかも一定加重で運動を行っても、筋肉に加わる負荷量は運動姿勢に応じて大きく変動しています。本研究室では、運動中の最適な筋活動曲線を設定すると、それを実現するために自動的に負荷制御を行う新しい筋力トレーニング機器を提案し、その効果の検証に取組んでいます。
テーマ8)閉鎖循環式陸上養殖の知能化および自動化の研究
水産物の養殖技術の発展は世界中の人々の「食」の安定供給に寄与しています。しかし海産物の養殖はこれまで洋上や沿岸部など海あるいはその近くに限られてきました。当研究室では海から離れた地域でも海産物を生産可能とする閉鎖循環式陸上養殖技術の高度化に関する研究を行っています。海産物の陸上養殖は海と同等の環境を陸上に構築する必要があるため高コストとなることが課題でした。ICT技術、画像処理技術、AI技術等を活用して水質管理や畜養魚のヘルスモニタリング等の自動化および知能化に取り組むとともに、魚の成長に最適な飼育条件を解明する研究を行っています。現在は、「クエ」を対象魚とし、低コストで高効率な生産技術の研究に取り組んでいます。本研究は株式会社水産未来研究所と連携して行っています。
